Finding
stepper
motors wiring
|
Stepper motors come with multiple wires.
The rotating direction depends
on the sequence of
the pulses applying to the coil windings. The rotating speed depends
on the pulsing frequency. There is a method to use an oscilloscope finding
the phase relation to the windings.
First the coil terminal pairs must be identified and each pair of coil terminals resistance can be measured by using a multimeter. The unipolar stepper has a common terminal center-tapping on each coil. The resistance on the A-A' is approximately twice the resistance on A-common and A'-common. The resistance between all 4 terminals and the common terminal are about the same. By using a ohm meter to measure the resistance between the terminals of a 5-wire unipolar stepper motor, it can only be found the common terminal. But you can not identify the terminals which one is A, A', B and B'.  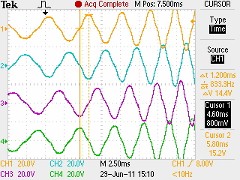 To test a unipolar stepper motor, it is easier to use a 4-channel digital scope. First the scope captures the waveform and displays it on the screen. Then it finds out the phase relationship between each windings. Hookup the four terminals to the probes of each channel. The common terminal connects to the ground lead. Turn the motor by hand, you may need to try a few times to get a smooth wave form. Use channel 1 for reference as assigned for terminal A. As shown in the captured wave form, channel 1 (yellow) is A terminal, channel 2 (blue) is A', channel 3 (purple) is B and channel 4 (green) is B'.  The waveforms show that A is always at a 180o
phase advancing to
A'. The same situation goes for the phases between B and B'. The B
terminal is a 90o phase lag behind A.
When driving the unipolar stepper motor in a clockwise direction, the
wave driving sequence is A-B-A'-B'. Reverse sequence
will result in a counter-clockwise direction.
The waveforms show that A is always at a 180o
phase advancing to
A'. The same situation goes for the phases between B and B'. The B
terminal is a 90o phase lag behind A.
When driving the unipolar stepper motor in a clockwise direction, the
wave driving sequence is A-B-A'-B'. Reverse sequence
will result in a counter-clockwise direction.
Finding the wiring is similar to the 4-terminal bipolar stepper motors. First using an ohm meter to measure the 4 terminals; the two coils of A-A' and B-B' pairs have approximately the same resistance. The ohm meter can only be used to find When the two coil windings of A-A' and B-B', but need to be identified which pair of terminals belongs to A, A' and B, B'. This can be done by using a 2-channel digital oscilloscope. 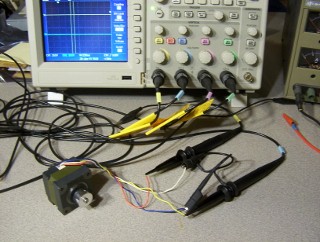 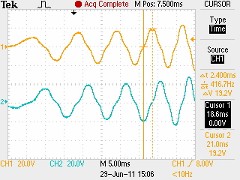
After finding out the terminal pairs of the two coils by an ohm meter, next to assign the first coil terminals as A-A' and connects to channel 1. The probe connects to one of the terminal and the ground lead connects to the other. The same connection goes for the second coil B-B' terminal pair in channel 2. Turn the motor by hand, you may need to try few times to get a smooth waveform. If the waveform of channel 1 is not a 90o phase lead of channel 2, swap the connection with the B-B' terminal to the probe and ground lead of channel 2. Repeat in turning the motor by hand until to see is a smooth waveform. In the bipolar stepper motor, the "A" terminal is always a 90o phase leading to "B" terminal. When the captured waveform showing the channel 1 waveform is a 90o phase leading channel 2, the coil wirings shows that channel 1 probe lead is A and channel 1 ground lead is A'. Similarly, the channel 2 probe lead is B and ground lead is B'.  Driving the bipolar stepper is different from the unipolar version. The A-A' terminals and B-B' terminals need its polarity reversed. To reverse the direction of rotation, both versions of the stepper motors need to be the same by reversing the pulse sequence.  Futhermore, some of the stepper motors have 6 terminals. There are two common terminals on each center-tap coil. These stepper motor can be used either as a unipolar or bipolar.
 The pulse waveforms driving are the same for both of the unipolar steppers and bipolar motors. The difference is the polarity of terminals are fix on the unipolar stepper motors, the bipolar terminals polarity are alternatly reverse on each steps. That is driving an unipolar stepper motor is simpler. The uniploar stepper is less size-troque efficience than the bipolar version, because the unipolar stepper motor only half of the coil activates at a time. The wave drive is the simpler method that only one terminal is applied pulse at a time. The full step driving requires pulses are applied to 2 terminals that will have higher trouqe. The half step drive is alternately applying one and two terminals. The stepper can move at finer pitch can have twice steps per revolution, but the troque is varying at each step can cause more vibration. |