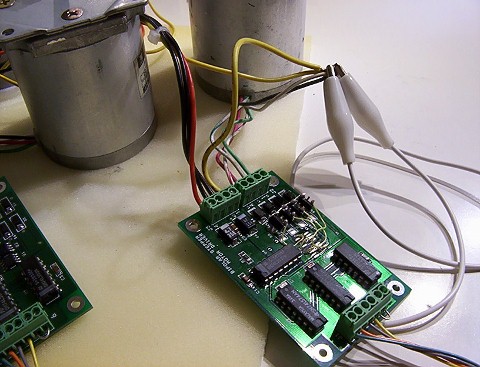
Bipolar
stepper motor driver board: this circuit board is used for driving a
single small
power stepper motor. The driver board can be connected to a stepper
motor with a 3-5V power supply to
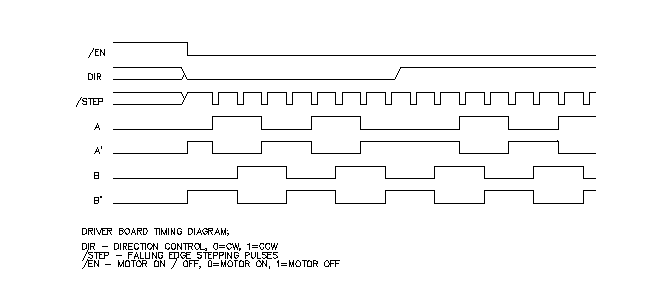
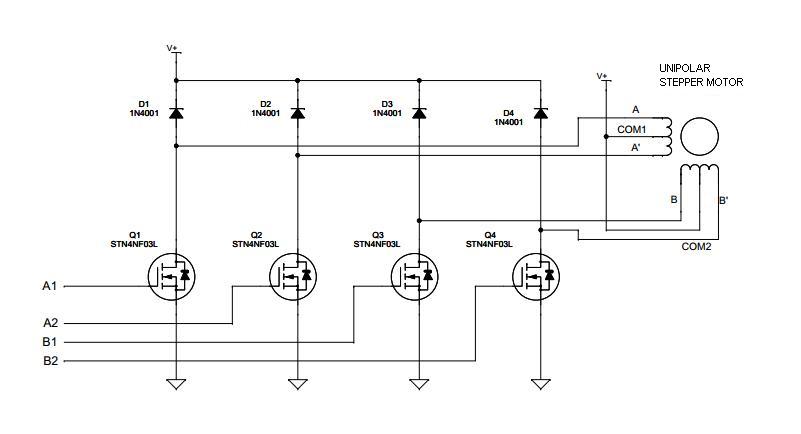
a maximum of 2.5A current. The Diode Inc. ZXMHC3F381N8 H-bridge MOSFET transistors are used in the circuit to drive the stepper motor windings, it is a complementary array containing 4 transistors to form an H-bridge. The advantage of using MOSFET is that this device is simpler to interface with the logic circuit. Unlike the bi-polar transistor, it is controlled by a gate voltage and the gate power is only drawn at the transistion time. It consumes almost no gate power to maintain the device at the ON state, thus the heat dissipation on the device will be less. But the MOSFET requires a stronger pull up and pull down power to turn the channels ON and OFF. The interfacing logic devices to the gate terminals should use 74HCT, 74HC, and etc. series devices. Since this MOSFET's gate threadhold voltage is 3V, the LVTTL (3.3V logic) should not be used to drive the transistors.  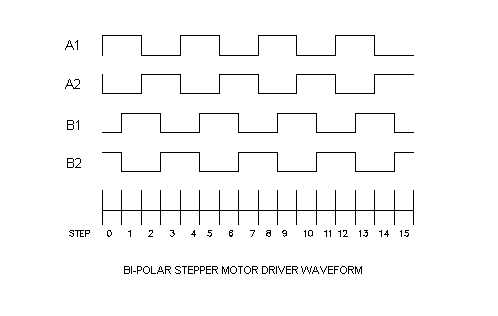 In the 2-coil, bi-polar stepper motor, the driving pulses require 4-phase signals. The A terminal is always inverted to A' terminal, same as the B-B' terminals. The B-B' pulse phases are 90o lagging when it turns in a clockwise direction and 90o leading at a counter-clockwise direction. |